
A0030/A0010微航姿參考系統(tǒng)(陀螺儀)在激光AGV智能小車應(yīng)用
隨著物流行業(yè)飛速發(fā)展,原始人工搬運(yùn)的方式工作效率低下,成本高昂,無(wú)法滿足大量貨物搬運(yùn)工程,隨之研發(fā)出各種模式AGV智能小車設(shè)備,如坐標(biāo)式,電磁式,激光式,光學(xué)式,慣導(dǎo)式,視覺(jué)式等模式AGV智能小車代替人工搬運(yùn),從而提高工作效率,節(jié)約成本。但隨時(shí)代的變化,技術(shù)的革新,為滿足高效率高性能的需求,單一模式的AGV小車在高效率的工作中可能會(huì)出現(xiàn)不可預(yù)測(cè)的因素,從而對(duì)設(shè)備本身或其它設(shè)備產(chǎn)生影響工作效率,為給各模式AGV智能小車提供更高性能,嘉興市納杰微電子技術(shù)有限公司研發(fā)出一款陀螺慣導(dǎo)方案A0030/A0010航姿參考系統(tǒng)(陀螺儀)專為智能AGV小車設(shè)備解決方案,該陀螺慣導(dǎo)產(chǎn)品配激光、視覺(jué)、光學(xué)、磁等傳感器融合使用,從而使AGV性能大大提高。A0030/A0010產(chǎn)品性能穩(wěn)定,應(yīng)用廣泛,得到行業(yè)內(nèi)各大知名廠商認(rèn)可并批量使用。
下面分享一下傳統(tǒng)激光AGV智能小車工作狀態(tài)與加上A0030/A0010陀螺慣導(dǎo)系統(tǒng)后的工作狀態(tài)
傳統(tǒng)激光AGV智能小車方案中,通過(guò)激光掃描器掃描激光定位標(biāo)志從而確定AGV小車在應(yīng)用場(chǎng)景中的位置,通過(guò)內(nèi)置導(dǎo)航地圖精確控制一臺(tái)或多臺(tái)AGV小車運(yùn)動(dòng),但其存在一定缺點(diǎn),激光導(dǎo)航精度受到激光定位標(biāo)志布局影響,動(dòng)態(tài)性能較差,在AGV運(yùn)行過(guò)程中,輪胎有時(shí)會(huì)打滑,導(dǎo)致AGV小車方向偏離。 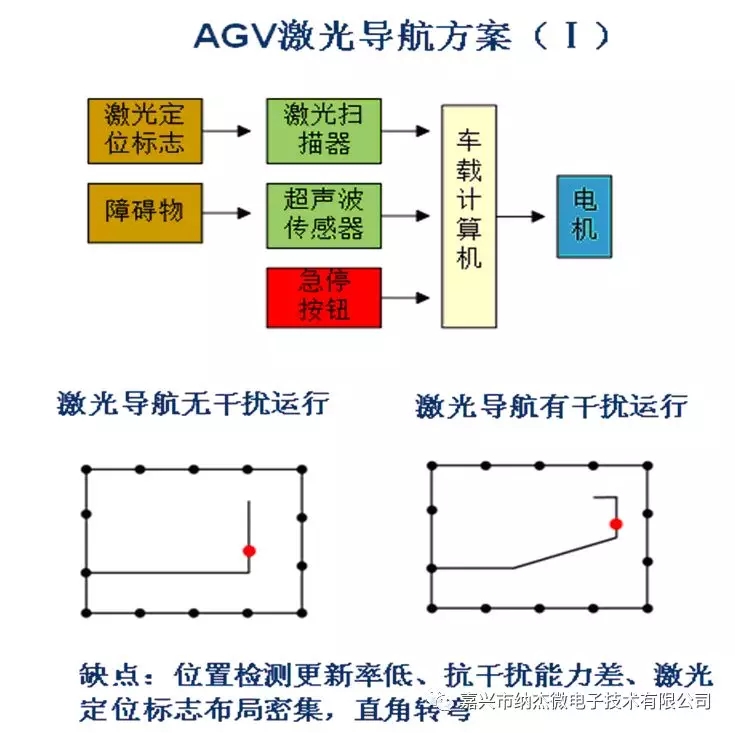
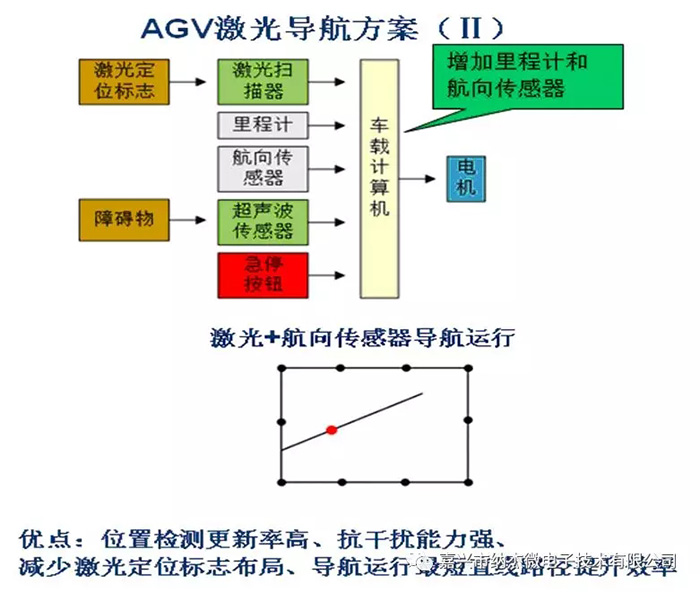
新激光AGV智能小車方案很好的解決了傳統(tǒng)方案存在的問(wèn)題,通過(guò)激光掃描器掃描激光定位標(biāo)志從而確定AGV小車在應(yīng)用場(chǎng)景中的位置,在小車未接收到激光定位信號(hào)時(shí),采用里程計(jì)和航向傳感器(單軸陀螺儀)融合解算出小車的實(shí)時(shí)位置。在AGV小車轉(zhuǎn)向時(shí),采用航向傳感器(單軸陀螺)修正小車轉(zhuǎn)動(dòng)角度,防止小車打滑帶來(lái)的航向誤差。通過(guò)內(nèi)置導(dǎo)航地圖精確控制一臺(tái)或多臺(tái)AGV小車運(yùn)動(dòng)。 A0030-G/GA模式微航姿參考系統(tǒng)(航向傳感器/陀螺儀)非常完美的與激光傳感器整合為AGV智能小車提供導(dǎo)航輔助,為其運(yùn)動(dòng)軌跡提供有力保障。

A0030A/0010微航姿參考系統(tǒng)(航向傳感器/陀螺儀)其主要特點(diǎn):
· 二種模式可配置:GYRO_Z(單軸陀螺模式)和GYRO_Z_ACC(單軸陀螺+加速度計(jì)模式)
· 高精度:
- ±0.1°/小時(shí)(A0030 Gyro_Z、Gyro_Z_ACC時(shí))
- ±0.5°/小時(shí)(A0010 Gyro_Z_ACC模式時(shí))
· 高速數(shù)據(jù)輸出:100Hz
· 輸入電源電壓:6 ~ 12V
· 產(chǎn)品均經(jīng)過(guò)溫度、非正交誤差以及交叉敏感度補(bǔ)償標(biāo)定
· 高可靠性,防水、防震、防電磁干擾
· MTBF:>5000 小時(shí)
· 外殼設(shè)計(jì):軍工級(jí),硬鋁合金灌封技術(shù),適應(yīng)于各類嚴(yán)酷環(huán)境
· 尺寸大小:50mm × 45mm × 21mm
· 接口(可配接口線):
- 軍品J30J – mini DB9
- 5芯微型航空連接器
· 工作環(huán)境溫度:-40 ~ +85 °C
應(yīng)用場(chǎng)合
· 移動(dòng)機(jī)器人、AGV
· 各類平臺(tái)姿態(tài)穩(wěn)定系統(tǒng)
· 動(dòng)中通、衛(wèi)星接收機(jī)平臺(tái)穩(wěn)定系統(tǒng)
· 飛行控制系統(tǒng)(無(wú)人機(jī)、多旋翼、直升機(jī),等)
· 艦船控制系統(tǒng)(水上、水下、ROV)






 關(guān)注官方微信
關(guān)注官方微信
